publications
2025
-
 MOSAIC: A Skill-Centric Algorithmic Framework for Long-Horizon Manipulation PlanningItamar Mishani , Yorai Shaoul , and Maxim Likhachev2025
MOSAIC: A Skill-Centric Algorithmic Framework for Long-Horizon Manipulation PlanningItamar Mishani , Yorai Shaoul , and Maxim Likhachev2025 -
 Multi-Robot Motion Planning with Diffusion ModelsYorai Shaoul* , Itamar Mishani* , Shivam Vats* , and 2 more authorsIn 13th International Conference on Learning Representations (ICLR) and also at AAAI 2025 Workshop on Multi-Agent Path Finding , 2025
Multi-Robot Motion Planning with Diffusion ModelsYorai Shaoul* , Itamar Mishani* , Shivam Vats* , and 2 more authorsIn 13th International Conference on Learning Representations (ICLR) and also at AAAI 2025 Workshop on Multi-Agent Path Finding , 2025Diffusion models have recently been successfully applied to a wide range of robotics applications for learning complex multi-modal behaviors from data. However, prior works have mostly been confined to single-robot and small-scale environments due to the high sample complexity of learning multi-robot diffusion models. In this paper, we propose a method for generating collision-free multi-robot trajectories that conform to underlying data distributions while using only single-robot data. Our algorithm, Multi-robot Multi-model planning Diffusion (MMD), does so by combining learned diffusion models with classical search-based techniques – generating data-driven motions under collision constraints. Scaling further, we show how to compose multiple diffusion models to plan in large environments where a single diffusion model fails to generalize well. We demonstrate the effectiveness of our approach in planning for dozens of robots in a variety of simulated scenarios motivated by logistics environments.
@inproceedings{mmd, title = {Multi-Robot Motion Planning with Diffusion Models}, author = {Shaoul*, Yorai and Mishani*, Itamar and Vats*, Shivam and Li, Jiaoyang and Likhachev, Maxim}, booktitle = {13th International Conference on Learning Representations (ICLR) and also at AAAI 2025 Workshop on Multi-Agent Path Finding}, year = {2025}, recognition = {Spotlight} }


2024
-
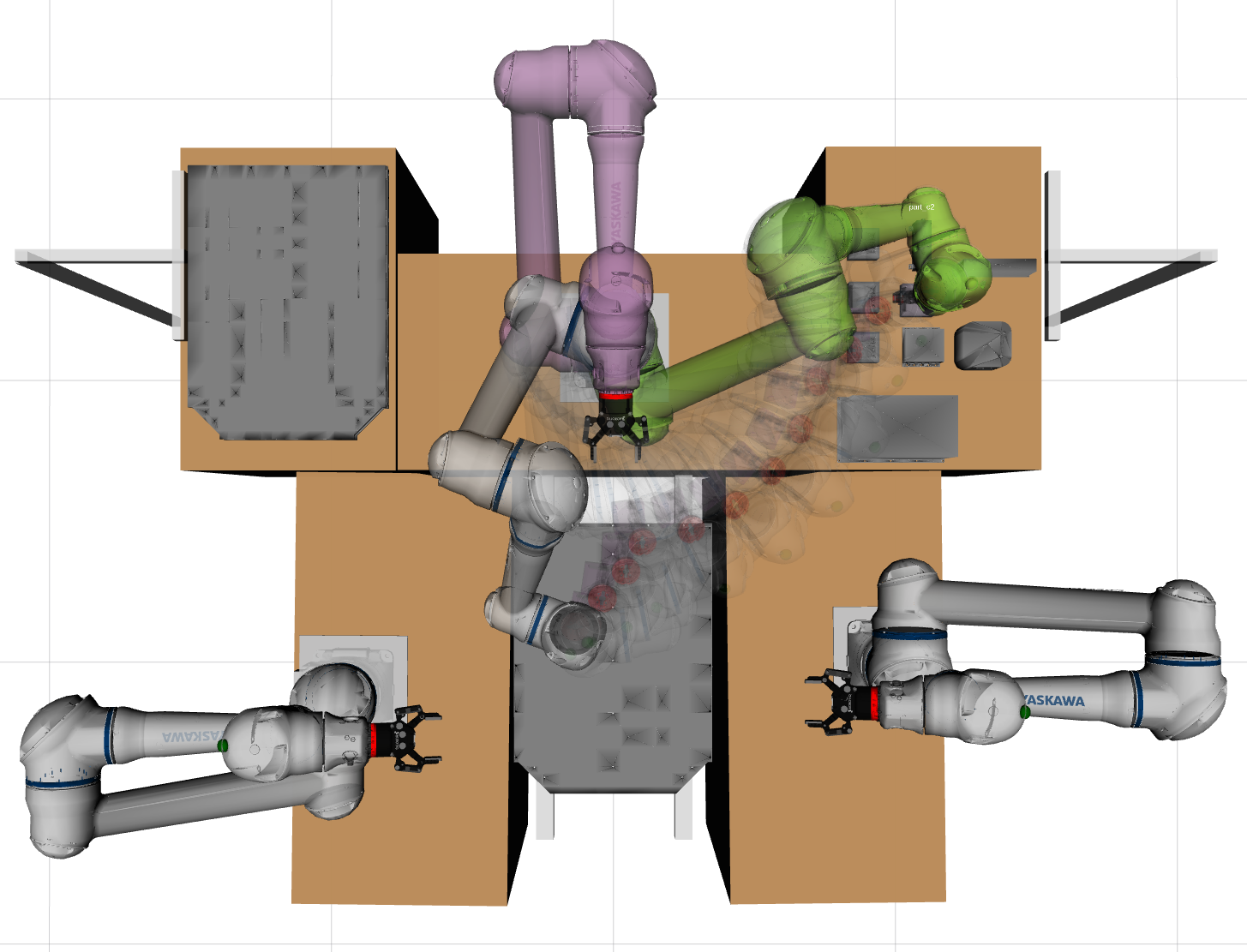
 Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated ExperiencesYorai Shaoul* , Itamar Mishani* , Maxim Likhachev , and 1 more authorIn 34th International Conference on Automated Planning and Scheduling (ICAPS) , 2024
Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated ExperiencesYorai Shaoul* , Itamar Mishani* , Maxim Likhachev , and 1 more authorIn 34th International Conference on Automated Planning and Scheduling (ICAPS) , 2024An exciting frontier in robotic manipulation is the use of multiple arms at once. However, planning concurrent motions is a challenging task using current methods. The high-dimensional composite state space renders many well-known motion planning algorithms intractable. Recently, Multi-Agent Path-Finding (MAPF) algorithms have shown promise in discrete 2D domains, providing rigorous guarantees. However, widely used conflict-based methods in MAPF assume an efficient single-agent motion planner. This poses challenges in adapting them to manipulation cases where this assumption does not hold, due to the high dimensionality of configuration spaces and the computational bottlenecks associated with collision checking. To this end, we propose an approach for accelerating conflict-based search algorithms by leveraging their repetitive and incremental nature – making them tractable for use in complex scenarios involving multi-arm coordination in obstacle-laden environments. We show that our method preserves completeness and bounded sub-optimality guarantees, and demonstrate its practical efficacy through a set of experiments with up to 10 robotic arms.
@inproceedings{xecbs, title = {Accelerating Search-Based Planning for Multi-Robot Manipulation by Leveraging Online-Generated Experiences}, author = {Shaoul*, Yorai and Mishani*, Itamar and Likhachev, Maxim and Li, Jiaoyang}, booktitle = {34th International Conference on Automated Planning and Scheduling (ICAPS)}, year = {2024}, recognition = {Best Student Paper} } -
 Constant-time Motion Planning with Anytime Refinement for ManipulationItamar Mishani , Hayden Feddock , and Maxim LikhachevIn 2024 IEEE International Conference on Robotics and Automation (ICRA) , 2024
Constant-time Motion Planning with Anytime Refinement for ManipulationItamar Mishani , Hayden Feddock , and Maxim LikhachevIn 2024 IEEE International Conference on Robotics and Automation (ICRA) , 2024Robotic manipulators are essential for future autonomous systems, yet limited trust in their autonomy has confined them to rigid, task-specific systems. The intricate configuration space of manipulators, coupled with the challenges of obstacle avoidance and constraint satisfaction, often makes motion planning the bottleneck for achieving reliable and adaptable autonomy. Recently, a class of constant-time motion planners (CTMP) was introduced. These planners employ a preprocessing phase to compute data structures that enable online planning provably guarantee the ability to generate motion plans, potentially sub-optimal, within a user defined time bound. This framework has been demonstrated to be effective in a number of time-critical tasks. However, robotic systems often have more time allotted for planning than the online portion of CTMP requires, time that can be used to improve the solution. To this end, we propose an anytime refinement approach that works in combination with CTMP algorithms. Our proposed framework, as it operates as a constant time algorithm, rapidly generates an initial solution within a user-defined time threshold. Furthermore, functioning as an anytime algorithm, it iteratively refines the solution’s quality within the allocated time budget. This enables our approach to strike a balance between guaranteed fast plan generation and the pursuit of optimization over time. We support our approach by elucidating its analytical properties, showing the convergence of the anytime component towards optimal solutions. Additionally, we provide empirical validation through simulation and real-world demonstrations on a 6 degree-of-freedom robot manipulator, applied to an assembly domain.


2023
-
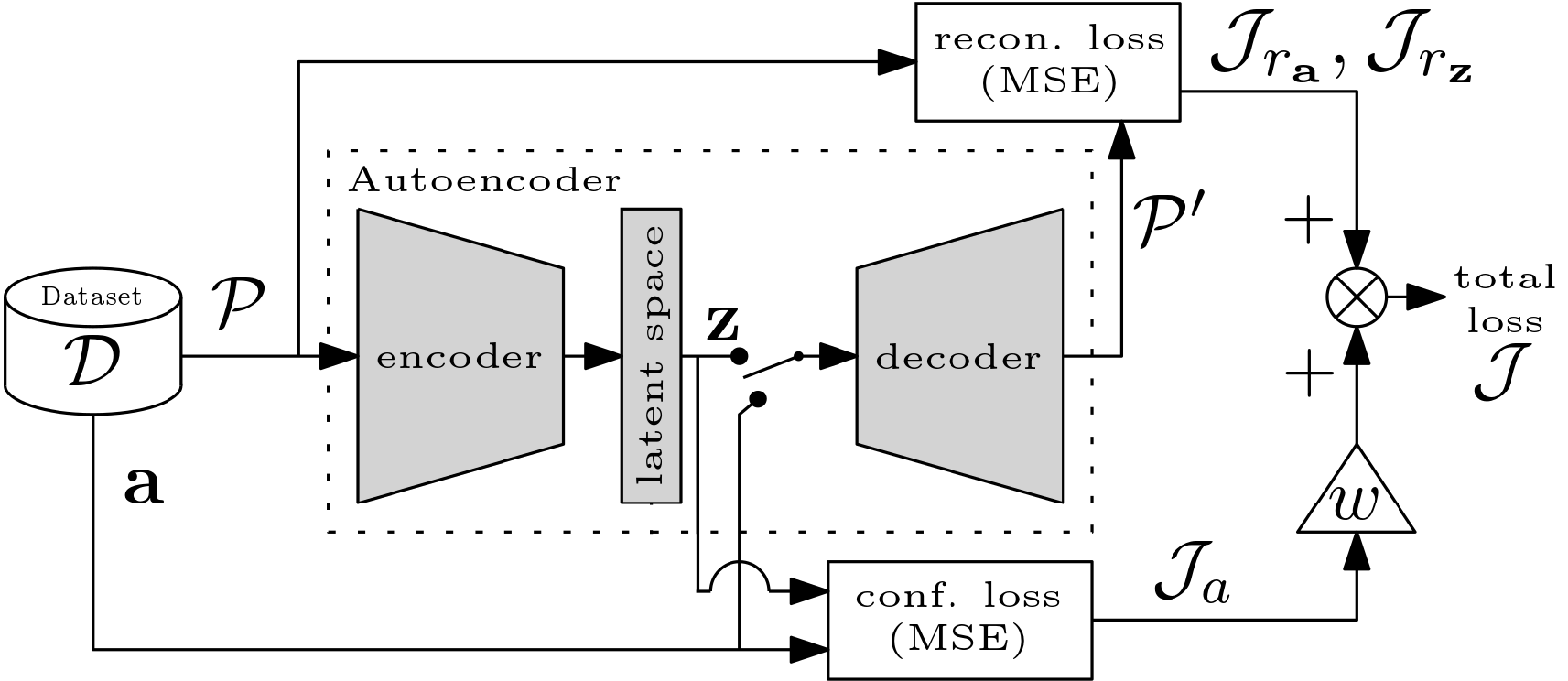 Learning configurations of wires for real-time shape estimation and manipulation planningItamar Mishani , and Avishai SintovEngineering Applications of Artificial Intelligence, 2023
Learning configurations of wires for real-time shape estimation and manipulation planningItamar Mishani , and Avishai SintovEngineering Applications of Artificial Intelligence, 2023Robotic manipulation of a wire by its ends requires rapid reasoning of its shape in real-time. A recent development of an analytical model has shown that sensing of the force and torque on one end can be used to determine its shape. However, the model relies on assumptions that may not be met in real world wires and do not take into account gravity and non-linearity of the Force/Torque (F/T) sensor. Hence, the model cannot be applied to any wire with accurate shape estimation. In this paper, we explore the learning of a model to estimate the shape of a wire based solely on measurements of F/T states and without any visual perception. Visual perception is only used for off-line data collection. We propose to train a Supervised Autoencoder with convolutional layers that reconstructs the spatial shape of the wire while enforcing the latent space to resemble the space of F/T. Then, the encoder operates as a descriptor of the wire where F/T states can be mapped to its shape. On the other hand, the decoder of the model is the inverse problem where a desired goal shape can be mapped to the required F/T state. With the same collected data, we also learn the mapping from F/T states to grippers poses. Then, a motion planner can plan a path within the F/T space to a goal while avoiding obstacles. We validate the proposed data-based approach on Nitinol and standard electrical wires, and demonstrate the ability to accurately estimate their shapes.

2022
-
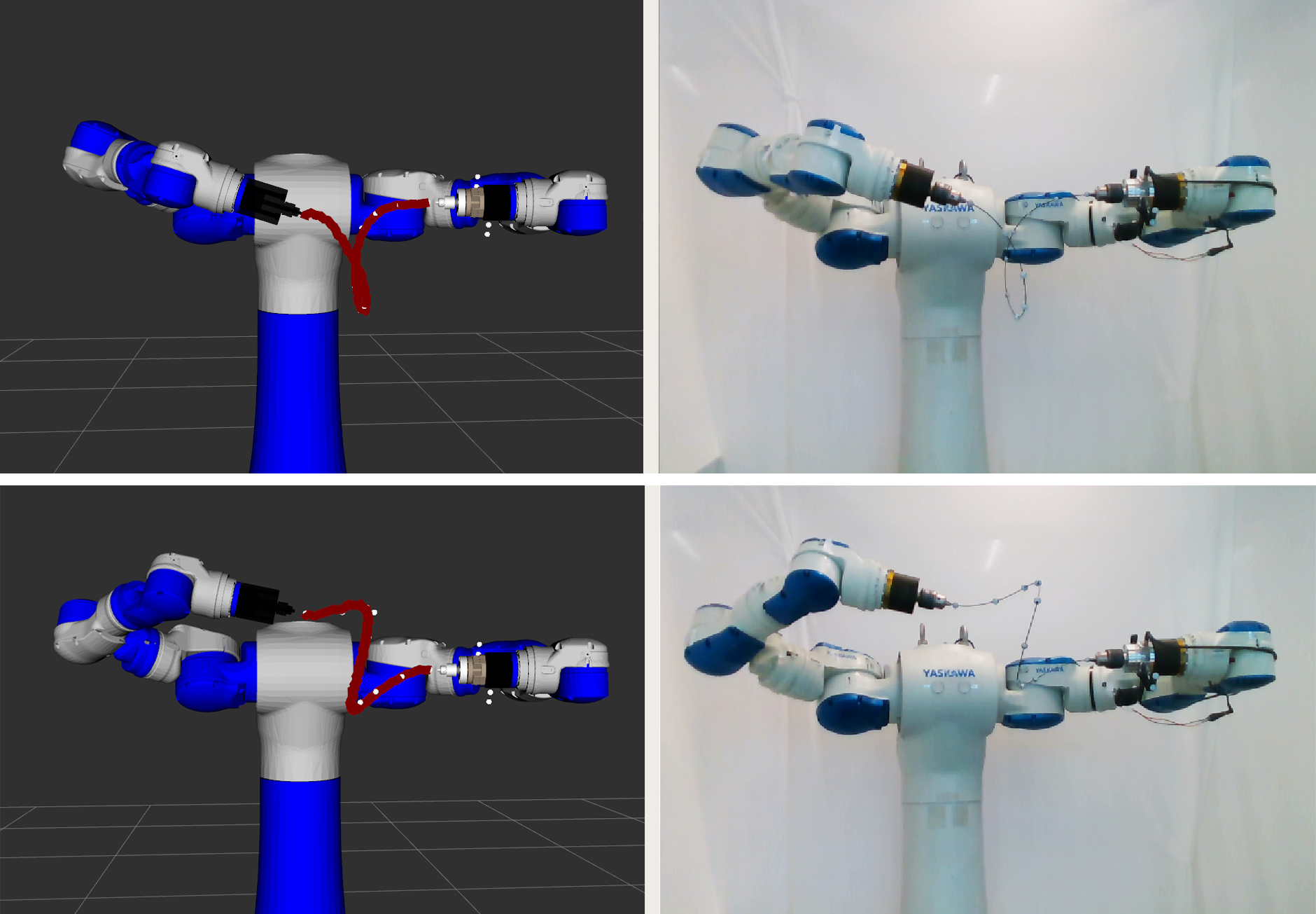 Real-Time Non-Visual Shape Estimation and Robotic Dual-Arm Manipulation Control of an Elastic WireItamar Mishani , and Avishai SintovIEEE Robotics and Automation Letters, 2022
Real-Time Non-Visual Shape Estimation and Robotic Dual-Arm Manipulation Control of an Elastic WireItamar Mishani , and Avishai SintovIEEE Robotics and Automation Letters, 2022The dual-arm manipulation of elastic wires has been a hard problem for many decades. Nevertheless, recent work has shown that the shape of a wire can be defined by a very simple representation. Theoretical analysis has stated that simple sensing of the force and torque at one end of the wire can be used to determine its shape. In this letter, we experimentally analyze the developed theoretical foundation. We deploy a dual-arm robotic system able to accurately manipulate an elastic wire. The system does not require complex visual perception and is able to reason about the shape of the wire by solely sensing forces and torques on one arm. Furthermore, we propose a full framework in which the mechanical properties of the wire are rapidly approximated in real-time. Then, a simple control rule based on Force/Torque feedback is used to manipulate the wire to some goal or track a planned path. We conduct various experiments on a full-scale system to analyze pose estimation and control accuracies. Results validate the benefit of the approach and demonstrate the ability to accurately manipulate a wire.
